Living Object Grasping using Two-stage Graph Reinforcement Learning Zhe Hu 0:46 4 years ago 113 Далее Скачать
Living Object Grasping using Two-stage Graph Reinforcement Learning Zhe Hu 0:42 4 years ago 176 Далее Скачать
PLAIF ( 플라잎 ) - Advanced unknown grasping using Deep learning PLAIF 2:54 2 years ago 601 Далее Скачать
Living Object Grasping using Inverse Reinforcement Learning Focusing on the Adversarial Behavior Zhe Hu 1:40 3 years ago 133 Далее Скачать
Reinforcement learning of grasping a deformable object Robotic Manipulation for Sort and Segregation 1:47 4 years ago 133 Далее Скачать
Evaluating a Movable Palm in Caging Inspired Grasping Using a Reinforcement Learning-Based Approach Robot Perception and Learning (RPL) 11:26 3 months ago 33 Далее Скачать
Yunfei Bai - How to Solve Sim2Real for Robot Grasping with GAN Kuan Fang 23:55 4 years ago 462 Далее Скачать
PLAIF ( 플라잎 ) - Unknown Grasping ( Bin Picking) using Deep Learning and Reinforcement Learning PLAIF 5:28 3 years ago 802 Далее Скачать
Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning Andy Zeng 5:06 6 years ago 8 249 Далее Скачать
A Robot learns how to pick up unknown objects. Abdulrahman Al-Shanoon 3:57 3 years ago 218 Далее Скачать
Reinforcement Learning Based Pushing and Grasping Objects from Ungraspable Poses(ICRA 23) HAO ZHANG 2:58 1 year ago 1 249 Далее Скачать
Deep Reinforcement Learning for Vision-Based Robotic Grasping: A Simulated Comparative Evaluation of ICRA 2018 2:37 6 years ago 4 467 Далее Скачать
Improving reinforcement learning based moving object grasping with trajectory prediction Dr Irfan Hussain's Lab 3:40 4 months ago 14 Далее Скачать
Visual-Guided Grasping System using Deep Reinforcement Learning Michael Chen 7:04 4 years ago 125 Далее Скачать
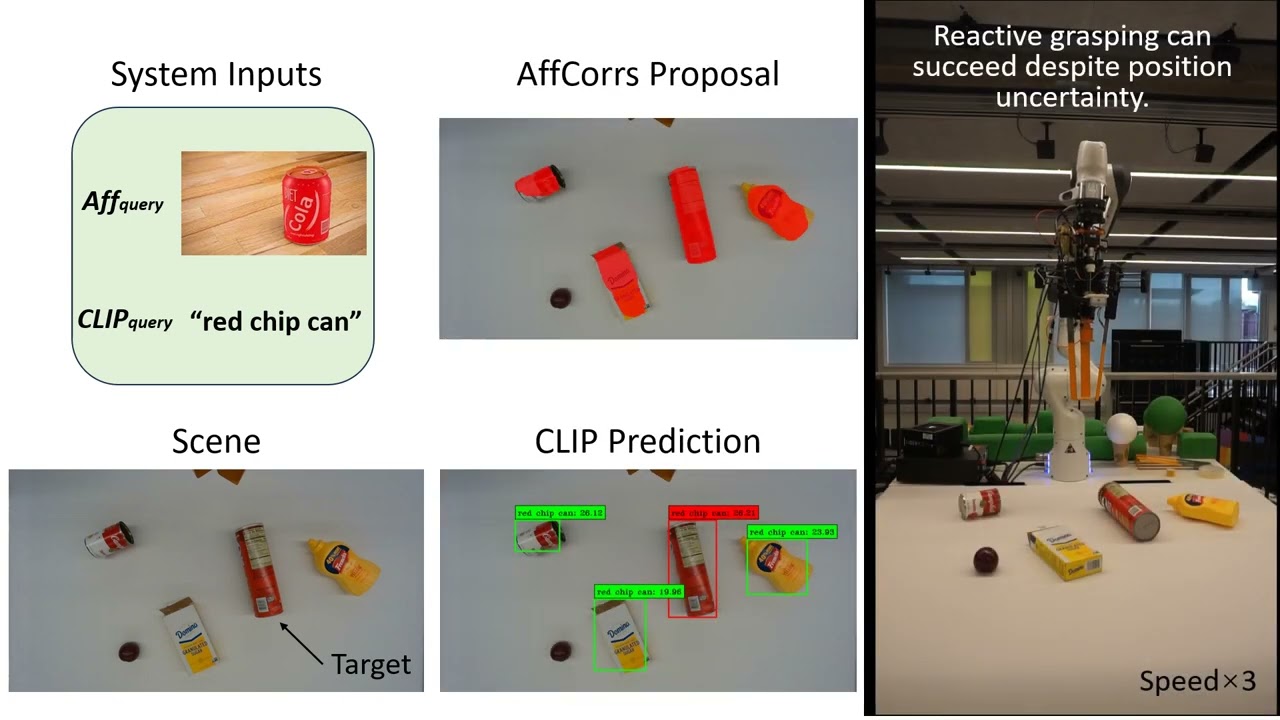
Reinforcement Learning-based Grasping via One-Shot Affordance Localization Robot Perception and Learning (RPL) 2:34 1 year ago 219 Далее Скачать